





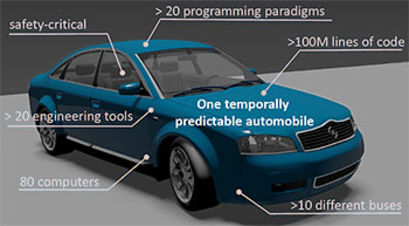
Moderne Fahrzeuge werden immer komplexer, was eine immer aufwendigere Fehlersuche nach sich zieht. Gerade bei sicherheitskritischen Funktionen müssen Fehler schnell behoben werden. Zwar existieren bewährte Verfahren, um die Fehlerfreiheit von kritischen Funktionen nachzuweisen, allerdings beschränken sich diese Verfahren lediglich auf die Überprüfung von Ausgabewerten. Das Zeitverhalten spielt jedoch für sicherheitskritische Funktionen eine ebenso große Rolle. Beispielsweise reicht es nicht aus zu überprüfen, ob eine Bremse die korrekte Bremskraft erreicht, dies muss in einer vorgegebenen Zeit erfolgen. Das Projekt AUTOSAFE, das nach dreieinhalbjähriger Laufzeit Ende Dezember 2015 abgeschlossen wurde, entwickelte Techniken, die Verfahren für funktionale und zeitliche Verifikation von Fahrzeugsoftware miteinander zu verbinden.
Deutsch-indische Zusammenarbeit
Die indisch-deutsche Zusammenarbeit im Projekt AUTOSAFE ergibt sich daraus, dass Fahrzeuge zunehmend „software-intensiver“ werden, d. h. ein Großteil neuer Funktionen, wie z. B. Fahrerassistenzsysteme, werden in Software realisiert. Deutschland besitzt eine international herausragende Fachkompetenz im Automobilsektor; Indien besetzt eine leitende Rolle im Bereich der Softwareentwicklung. Eine indisch-deutsche Zusammenarbeit vereint folglich sowohl jene Kompetenzen als auch die Herausforderungen deutscher und indischer Unternehmen. Die an dem Projekt beteiligten Partnereinrichtungen waren auf deutscher Seite die Technische Universität München, Lehrstuhl für Realzeit-Computersysteme, die INCHRON GmbH und auf indischer Seite die IIT Kharagpur, Computer Science und das Tata Research Development and Design Centre (TRDDC).
Besondere Ergebnisse und Erfolge
Die Projektarbeit konzentrierte sich auf die integrierte funktionale und zeitliche Verifikation von Steuersoftware im Auto, wie beispielsweise von Bremsen oder der Geschwindigkeitsregelung. Die im Projekt durchgeführten Arbeiten lieferten Beiträge auf zwei verschiedenen Ebenen. Zum einen wurden theoretische Herausforderungen adressiert, um eine funktionale und zeitliche Verifikation von Softwaresystemen mit realistischem Umfang zu ermöglichen. Zum anderen wurde durch Integration industrieller Werkzeuge eine Arbeitsumgebung entwickelt, die demonstriert, dass die vorgeschlagenen Lösungen praktisch anwendbar sind.
Das Ergebnis ist eine Machbarkeitsstudie; weitere Arbeiten werden notwendig, um eine technisch ausgereifte Arbeitsumgebung für die Industrie bereitzustellen. Die Ergebnisse könnte sowohl von Automobilherstellern als auch von Komponentenzulieferern (wie BOSCH) genutzt werden. Ebenso werden die Ergebnisse für Entwickler von Fahrzeugsoftware (wie z.B. dem indischen Industriepartner TRDDC) oder Entwickler von Software-Entwurfswerkzeugen (wie z.B. dem deutschen Industriepartner INCHRON) von Nutzen sein.
Der Prototyp der Arbeitsumgebung wird gegen Projektende fertiggestellt sein.
Die Arbeiten resultierten in über 20 Veröffentlichungen in hochrangigen Fachzeitschriften und -konferenzen.
Hans Westphal
DLR Projektträger
Europäische und internationale Zusammenarbeit
Tel.: +49 228 3821 -1473
Hans.Westphal@dlr.de
Prof. Samarjit Chakraborty
Technische Universität München
Lehrstuhl für Realzeit-Computersysteme
Tel.: +49 89 289 -23550
samarjit@tum.de
